2017北京车联网与智能驾驶论坛于9月6-7日在北京昌平小汤山佐智自动驾驶园召开。会上,西安飞芯CEO雷述宇做了题为《固态车载激光雷达的设计思想》的演讲。

雷述宇:今天我的报告相对比较微观一些,重点探讨一下固态车载激光雷达应该是如何设计上的一些考虑。
报告分几部分,第一部分是公司简介,然后进入讨论。西安飞芯2016年年底成立,专门做固态车载激光雷达,我们之前的背景也主要是做传感器和车相关的集成电路。
我本人2006年回国,创办的第一家公司是做红外图像传感器,也是目前国内红外传感器的供应商,其中一个很大的应用就是做车载,所以跟车厂比较熟。去年我们开始探讨做固态车载激光雷达。
把激光雷达用在车载上还是要有一些跟车有关的考虑,首先第一点肯定是要便宜。第二点是可靠性高,因为车的使用寿命长。车行驶的情况、路况也都是不可控的,所以可靠性一定要高。第三点是干扰性强,因为毕竟是一个专业的部件。主要的干扰源有两个,一个是外面的背景光,主要是阳光的干扰;另一个干扰源是不同的激光雷达设备之间的相互干扰。因为未来所有的车辆都会放4到6个固态车载激光雷达,将会看到在路上有几百个激光雷达,相互之间的干扰非常严重。第四点很重要,就是人眼安全性的问题。毕竟是在路上用的东西,驾驶员、行人之间的安全是最重要的。我们研究激光雷达方案主要考虑能不能满足这四个条件。
我们做激光雷达的时候已经有很多公司在做,所以把大家能看到的方案做了一个总结,看看什么是可行的方案。有几个分类,机械转动、光源扫描的,还有全固态的。以探测机理进行分类,90%以上的公司用脉冲探测,这很直观和简单,发一个脉冲出去,收一个脉冲回来,测两个之间的距离。还有用连续波载波调制也是一个方案,还有激光的相干外差。
固态有两个思路可以用,一个是源端的,可以用激光阵进行扫描,激光波导相控阵,另一个是成像端直接用焦平面阵列芯片。
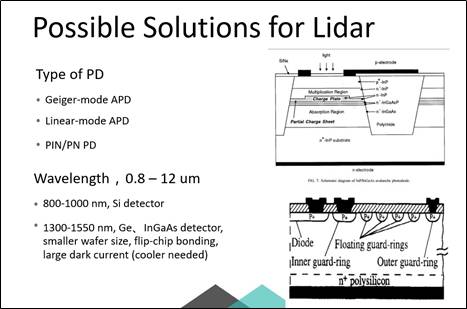
传感器方面至少有三种以上的选择。一个是Geiger APD,还有线性模式的APD,脉冲探测经常用线性模式的APD,激光雷达公司基本都是第二种。第三种是刚才说的做可见光摄像头的。传感器端至少有三种以上的选择,波长至少有两种以上的选择,一个是1000纳米以内的,可以用硅做传感器,包括手机摄像头; 然后是一千到两千纳米之间的,这样硅就没有办法探测了,因为波长不到,需要用Ge或者InGaAs做探测。判断何种方案可行,需要用前面的四个必要条件做判定。经过迭代演进,如果能符合那四个条件的方案,才是我们打算要做的方案。
所以目前而言我们的选择是这样,首先要便宜,要不就一定是用硅做传感器,做全固态就要成胶平面,然后是PIN,跟手机的工艺一样,都是为了要便宜。为了增加抗干扰性,至少两个方案,因为接收一个脉冲和光子回来,很难区分是谁的,所以我们直接放弃脉冲探测的方式。用两个方案之一,要么是用连续波调制方案,或者说直接利用激光的相干性,不同的激光源不相干,所以这是一个很好的抗干扰的方案。当然,如果仅仅为了追求某一两个问题,选择还会很多,如果为了追求便宜,那压力会放在抗干扰性上,在探测器端需要同时覆盖一个很大的视场角,收到的干扰源就太多了,所以不能说解决一个问题,结果把压力放在其他问题上。但凡说方案,至少四个必要条件要同时满足。
我们的初级指标要探测两百米,达到一定的精度,厘米量级,本身而言要覆盖一个比较大的视场角,这个可以跟用户商榷的。空间分辨率,因为做芯片可大可小,我们就暂且先定到0.1度×0.1度。帧频也要50赫兹以上。
作为传统的传感器要有设计准则存在,哪怕做一个陀螺和传感器,也有传感器的一般设计准则。第一个,既然是传感器,灵敏度是第一位的,所以说要做传感器,肯定要分析信号是什么?噪声是什么?信号是什么不用说了,毫无疑问,就是激光能量,所以说关键灵敏度取决于噪声。所以做任何一款激光雷达传感器,要分析系统噪声的主要来源是什么。比如脉冲探测系统的噪声主要来源于背景光的概率分布,连续波探测主要由于背景光引起的散弹噪声,相干外差探测的噪声主要是激光源的各种噪声,还有本征光引起的散弹噪声。无论做任何一个方案,或者即便不是激光雷达传感器,也要分析主要的噪声是什么,这样才能考虑怎么提升信噪比,达到想要的精度。
第二点,既然我们是在一个道路环境下使用,同时又有很多的设备,抗干扰性就很重要,抗干扰性和通信是一样的,所以需要分析这种抗干扰的机制可以在一个信道内可以容纳多少设备,所以要用到通信上面的知识。同时大家都希望把视场变成一个瞬时很窄的视场,这样抗干扰性很容易解决;但是做固态是很难做到的。因为固态没有转动,镜头也好,传感器也好,不怎么动,要覆盖一个很大的角度,视场都是很大的,相应的干扰性压力就会很大了。所以在一个很大的视场内如何做抗干扰,是固态车载激光雷达要考虑的一个很大的问题。
都说激光雷达,近红外也是一个很宽的波,即便在一千纳米以内,也有八百到一千之间的一个选择,那么波长如何选择?这个波长的太阳辐射有多少?探测器的响应有多少?波长在大气的穿透性多少?综合这些指标一定能分出来最优波长,然后是安全性也有一个标准。
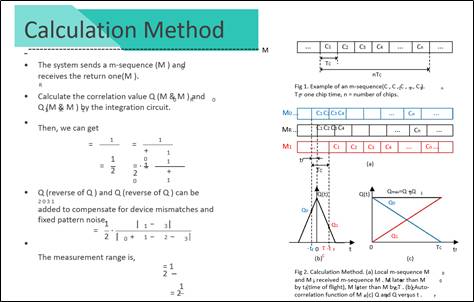
第一个方案刚才说了,用PN-coded Light。其实做类似方案的公司也会有很多,大的公司,去TI、ADI等等,大公司全会做这些方案,还有很多文献,将来也会探讨这些方案。
简单的说一下什么叫连续波,这个红车是我们自己的车,发激光雷达出去,这是一个连续波发射的,但是它是进行了载波调制的,不是一个规律性的信号,碰到物体以后会反射回来,探测器端形成接收,比较发射信号和接收的信号之间的相位差就知道距离,当然里面是有很多像素的,每个像素回波的时间肯定不一样,所以每个像素需要独立做解析的。
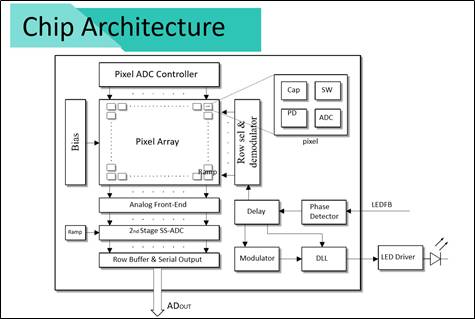
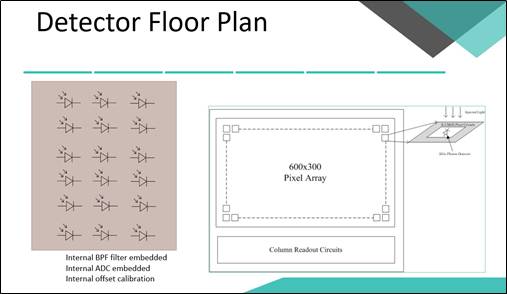
这个是我要设计的芯片,周边就是数字变动有关的,所以说每一个单元的回波是被独立解析的,每个单元的距离是被准确计算的。这个是通用的推导公式,就是怎么通过回波测算距离信息。
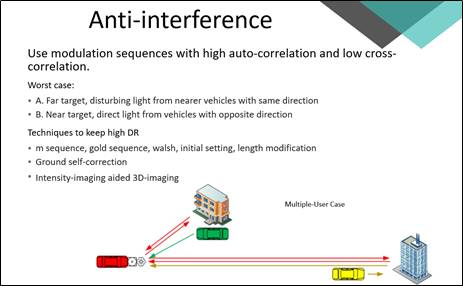
抗干扰是一个非常严重的问题,大家容易忽略,刚才的红车是我自己的车,发红色的光出去,收到红色的光回来,测量之间的延迟。但是大家看黄车、绿车,同样是发自己的光出去,碰到物体也一样会有一部分的能量反射到红车上,所以红车会收到黄车的光,绿车直接发回来,无论是黄车还是绿车,回波能量都比红车大很多。黄车之所以大是因为离物体近,反射回来,所以能量比我的红车还要大,所以可以假想在路上这种情况绝对是经常发生的,而且每个车4到6个激光雷达,可以假想前后左右上上下下得有多少辆车不同的激光雷达信号,所以说抗干扰压力非常大。
有很多大公司也是用类似的方案做激光雷达,他们做得怎么样?他们是用很传统的手机传感器方式,但是稍做改动,就做激光雷达,相当于一个传感器分成两道电路,两个相位之间进行比较。总而言之,光电二极管产生的电流包括背景光电流和信号光电流,但是无法区分,这就是它很大的问题,因为背景光电流很大。最后要靠计算把背景光减掉,用一个简单的电路很难形成一个非常高性能的激光雷达。
再具体说一下我们解决什么问题,我们的背景光可能一千倍强于自己的最弱信号光,背景光所引起的散干噪声是在0.1到0.3倍的信号光电流,所以背景光引起的波动也很大。抗干扰的问题也说了,自己的激光雷达信号是弱在不同的像素上,有远的物体的像素,有近的物体像素,差一万倍以上,因为两米和两百米能量差一万倍。本身作为传感器,每个像素也不可能做太大,积分电容也是非常小的。所以大家可以看到,这些问题是我们要解决的,要不解决的话,就回到刚才前面的图上,灵敏度上不去。
刚才说的第一个方案相对简单,第二个方案可靠性更高,是利用激光的相干性做的。因为激光有相干性,通常别的光源没有相干性,通过激光的相干性提高灵敏度和抗干扰性。刚才的专家对毫米波雷达比较熟悉,其实画的图跟毫米波雷达很像,但是毫米波雷达不同的设备之间都可以相干,激光只有和自己相干。激光的频率是被时间调制的,由低到高,由高到低是一个周而复始的信号。虚线代表回波,实线和虚线之间的频率差异通常代表回来的物体距离和速度,因为运动的物体存在多普勒效应,所以可以直接获得物体的速度和距离信息。
那么怎么利用激光的相干性?因为激光只跟自己相干,除非要做非常复杂的电路,把两个激光源拉近相干性。激光分成两束,一部分发出去,频率被调制,由低到高,由高到低的频率调制,碰到物体以后会反射回来,另外留一部分能量发到本地,这两个激光都是从一个激光源出来,他们之间是有相干性的,就形成相干的探测。这个是相干探测,关键就来看这个公式,ES代表回波的电场,光是电磁波,EL是留在本地的一些光。如果直接探测回波的能量,无论是脉冲还是连续波,要看回波能量,信号正比于ESxES,远的弱,近的强,但是通常ES非常弱,特别是远处的;但是如果是相干探测,那么信号正比于ELxES,EL在本地非常强,因此相干探测器的灵敏度高。
总结一下第二方案的好处是什么,直接利用激光的相干性,有天然的抗干扰能力,另外和毫米波雷达一样,可同时得到距离和速度。相干光有很大的增益,几百万倍增益,事实上我们可以通过这个方式进行单光探测,就是能量弱到单光就可以探测,然后这个系统,虽然看的图比刚才简单,但是电路放在像素内,所以复杂得多。
第三个方案也是我们研究的,但是还没有开始具体做的,是激光相控阵的方案。这个是示意图,做一个波导阵列,通过改变不同激光的波长,在另外一维度形成扫描。这个是MIT,直接做二维的相控阵的阵列,光从边上进来,然后不断的分到每一个单元中,把光垂直发出去。
由于光要有一个垂直耦合的问题,光是水平面动的,现在垂直发出来,那面积就不可能做太小,那么本来水平走的光,突然垂直发出来,面积很大,换言之单元的面积也不小。MIT做到9微米,但不论是什么,都比我们的光的波长要长,毫米波形成像素,能量要会聚每个单元小于1/2波长,即便加一些算法也不能大于一个波长,通常是1/2波长到1个波长以内,现在这个远大于1个波长,远场能量根本不汇聚。现在的单元是9倍于它的波长,现在本来想汇聚到某一个点上,事实上变成81个次主瓣。这个就是我们要尽量避免的一个问题。
为什么出现这个现象?激光相控阵来源于硅光工艺,而硅光主要是用在芯片内和芯片间的光通信方面,只要能约束光是在波导内就可以,所以会有大量的精力在研究怎么做这些波导。做激光雷达没有这个必要。事实上光学也可以做光天线,不要改变光的方向,因为要改变光的方向就有垂直耦合的问题,你先解决垂直耦合的问题,没有垂直耦合就可以做,能量就可以汇聚。
还有一个很大的问题,就是发射和接收都要做到相控阵。目前的研究都是说发射怎么做相控阵,发射端怎么扫描没有问题,但是接收端要覆盖一个很大的视场,还是要有干扰性的问题,所以接收端也要形成相控阵,这样抗干扰的压力就会大大的降低,所以要做激光相控阵的方案,就得要做一个发射和接收都是相控阵的方案,跟毫米波一样。
关于解决的就是垂直耦合的问题,光别改变方向,光从芯片的背面进来的,芯片里面可以做很多的单元,这个尺寸可以做的相对比较小。但是哪个单元出来的波包,就可以形成相控阵,所以就不要说我把激光约束在一个内波导内,还是自由空间到自由空间,中间只是加一个相控阵阵列芯片。同样用光度的可逆性,也是可以用相控阵的方式形成一个接收,至少解决了垂直耦合问题,但是我们认为这个方案还是并不太好。
怎么改变各个单元的相位,我们就至少有七种以上的方式,我可以选哪个方式更合理,电光效应、电吸收效应,自由散流效应,液晶,你可以很多的方式改变每个像素之内的光程。当然你需要选择哪个方案,我们现在实在芯片上。但事实上用这两个方案还不够完美,因为系统做得还是复杂,能不能直接用电的方式是把它解决,中间还得有镜头组,能不能直接换成一个芯片,在芯片内就把电信号出去,同时还有相控阵等等,也可以实现。当然这个相对比较复杂,因为光的相控阵和毫米波相控阵的区别就是光的波长要比毫米波波长短很多或者频率高很多,所以光没法直接的转化成电信号,同时保留光的频率和相位信息,因此我们一定要想办法对光进行降频,如果光的频率降下来,它的相位和频率信息还保留,就可以直接转化电信号,这样做相控阵就会容易很多,这个是最可行的方案。