如果要用一句话来概括自动驾驶的状态,估计大多数供应商、车企以及谷歌,都会有相似的回答,在技术上,我们都准备好了。
谷歌的自动驾驶测试车已经在路上行驶了270多公里,其中过半是在自动驾驶的模式下完成的,至今为止,发生事故11余起,没有一起事故中有人员受伤,而且这些事故的起因也不在这辆自动驾驶车的身上。
奔驰、沃尔沃、奥迪、德尔福都进行了自动驾驶车辆的Live Show,每一场都是Happy Ending,抛开小刮小蹭,按时按量完成任务,成功证明了自家的自动驾驶技术是可行的。
剩下的有相关技术发布的供应商与车企,也都在默默地进行着测试和合作洽谈,根据早就制定好的时间表,一步步将其释放到现实生活之中。
当然,从技术上的准备好,到能够批量应用到实际产品,还有很长的一段鸿沟,每个企业的飞跃方式都透着那么点儿不同。这次,车云菌来到了德国Boxberg的试车场,与博世的自动驾驶技术有一场有约在先的相遇。

自动驾驶的实现差在哪儿?
从大方向上来说,其实各家的答案会比较类似。比如说高精度地图的部署,可以说,缺失了高精度地图,车辆很难达到完全的自动驾驶状态,刚刚加入这个战局的TomTom就在与博世合作继续进行研发;比如说车联网的必须,合格的人类驾驶员能够做到眼观四路耳听八方,对于车辆,似乎有了相同功能的摄像头、雷达与激光雷达就够了,但是联网的存在会加大与加快信息的获取,能够做到更精准地判断,而车联网的附属品——信息数据的不安全状态,也同样要引起足够的重视;比如法律的改写,从大面上责任的归属、能否合法上路到细化的各个系统是否满足现行安全法规要求,都需要坐下来一项项重新商讨。
涉及到具体事项,对于选择了不同研究方向的各个企业来说,对于这个问题的回答却是不尽然相同的。这次回答问题的博世中国市场部丰浩认为,除了法律、车联网及信息安全问题之外,还有三个问题需要解决:
1.传感器的可靠性。这个可靠性表现在两个方面,一是硬件本身能否一直处于正常的工作状态下,二是如果出现了数据缺失的情况,系统能不能据此做出正确的决定。
2.系统的冗余性,这是高度自动驾驶与完全自动驾驶的区别所在。高度自动驾驶只需要一套系统就够了,其表现在系统失效之后还能够正常工作保证安全,而完全自动驾驶则必须要有两套系统能够互为备份。这样,从零部件层面和系统架构层面都会出现交集让系统的复杂性成几何提升,从而对控制器与中央芯片的处理能力提出很大的挑战。
3.如何证明自动驾驶是可行的。在ISO 26262上,有A-D四个安全等级,而自动驾驶的安全等级被设定比ASIL D还要高,用数字来表明就是在使用了1-10亿次,只能出现1次失误,而这穷三代人的时间也无法完成。所以,如何去一个可接受的范围内去验证自动驾驶是否符合安全要求也是一个很大的挑战。
三步供养法则
博世管理董事会的Dirk Hoheisel博士在体验当天有一场名为《Cars that think and cat-automated driving for greater road safety》的演讲,演讲中Hoheise博士提到,要实现自动驾驶,从功能上而言,至少要具备以下8项:
1.自动刹车系统;
2.电控转向系统;
3.感知系统,即以摄像头、雷达、激光雷达为首的各类传感器;
4.人机交互与导航系统;
5.动力控制单元;
6.互联技术;
7.驾驶员监控系统;
8.系统网络架构。
自动刹车、电控转向、感知系统、导航系统、动力控制单元毋庸多言,这是一辆车能够进行自动驾驶的根本,而互联技术正如前文所提,是作为感知系统的延伸,可以视为进阶能力;人机交互与驾驶员监控系统则是让人与车辆彼此清楚对方在做什么,方便为接手车辆控制权和被接手控制权做准备。
至于最后的系统网络架构,在从驾驶辅助、部分自动驾驶到高度自动驾驶的进程中,不同的功能是单独叠加的,系统之间彼此独立,但是从高度自动驾驶往后,就不能再是各自为战,必须有一个大脑(中央控制单元)能够统筹分析各个传感器收集到的数据进而做出指令,系统的集成能力与不同部件之间的信息传输,采用何种构架都是要考虑的事情。
以此为基础,博世的自动驾驶有三步供养法则:
1.备份系统的设计
即是考虑到冗余性而进行的系统设计,一个功能至少要有两套系统能够实现。博世的Fall-back解决方案和避让辅助系统都遵循着这个规则。
Fall-back解决方案是博世对于自动驾驶冗余系统的一个初步尝试,解决方案由三个基本系统组成:ESP——Electronic stability program,博世的车身稳定系统;EPS——Electric power steering,电控转向系统;以及iBooster,电子刹车助力泵。
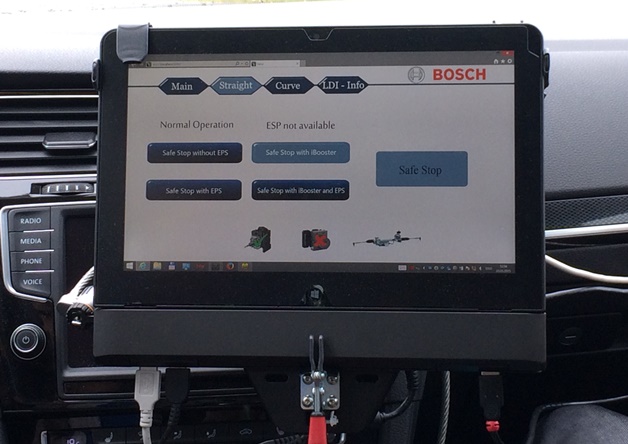
Fall-back解决方案测试画面
这三者之间互为备份。ESP的作用是保持车身稳定,但是其实现的方式是调整单个车轮的刹车力矩,因而既可以实现转向功能,也可以作为刹车使用;EPS只能用于转向;iBooster是刹车助力泵,但是同样可以实现车轮的单个控制,自然也兼顾了转向的功能。因而更准确一点说,是ESP与iBooster互为备份,同时这两个均为EPS的备份系统。
上图所示的测试过程正是在ESP失效的情况下,测试车辆在EPS和iBooster的共同作用下,能否实现紧急状况下的自动刹车。之所以说这套系统只是针对自动驾驶的初步尝试,也是因为它们在目前为止还并不能自动实现,只是博世对于系统的冗余性想到的一个组合方案,需要测试工程师手动按下右侧的safe stop按钮来模拟自动驾驶的情况。车上的工程师表示,未来这套解决方案集成到自动驾驶的大系统之后,当所有系统都处于正常工作状态时,中央控制单元要做到能够根据车辆所遇到的情况选择合适的组合方案来进行刹车或转向;而当某个系统失效的时候,传感器会告诉中央控制单元,中央控制单元则会启用备份方案。
在测试的过程中,一共尝试了三个不同的场景:正常情况下的紧急刹车、一侧车轮所在路面更为湿滑情况下防止车辆滑出车道的紧急刹车,以及在弯道时的自动刹车。当工程师按下对应的指令时,车辆均能够实现对应功能,但是实际应用时,系统的决策能力会是一个考验。
避让辅助系统则是采用相同的理念。在实际生活中遇到紧急情况时,相当一部分人的反应会是猛打方向盘,这个时候会因为对情况判断不足而出现转向过度或转向不足的现象。避让辅助系统就是在人们选择打方向盘的时候,根据前方物体(人、车或者障碍物)的位置,通过两种方式辅助转向:
1.通过EPS增加或减少转向力矩
2.通过ESP或iBooster对车轮进行刹车,同样实现车辆转向的变化
一般情况下,系统会默认第一个选项,主要是考虑到刹车会产生噪音,对于车内乘员来说体验相对较差。但是当其中某一个系统失效的时候,另外两个则会起到补充作用。
2.HMI
在交互设计上,博世秉承的理念是让驾驶员能够随时随地地清楚车辆在做什么,处于一个什么样的状态。那么,除了常规的车辆行驶数据显示之外,车辆采取的一些动作也要能够实时显示在车载屏幕上才好。

HMI设计概念展示
上图为博世以特斯拉Model S为原型设计的HMI方案,分别为激活自动驾驶状态、自动驾驶状态下车辆行为演示以及退出自动驾驶状态的演示,仪表盘则依旧显示车辆的行驶参数。或许这一块大屏就是是博世在宝马3系之后,特意改装将两辆Model S改装成自动驾驶车辆的原因之一,另外一方面大概是因为Model S为纯电动车,博世作为供应商,需要考虑到主机厂不同的产品需求提供不同的解决方案。

改装后的Model S在演示自动跟车
上面的HMI方案并没有实际应用到这辆Model S上,与它的同事从宝马3系改装过来的自动驾驶测试车并没有什么区别。两辆车改装之后有六个雷达、六个激光雷达、一个立体摄像头(双目)和一个GPS定位装置,可以实现高度自动驾驶。除了车辆自带屏幕之外,还有一块用于显示系统模拟外界成像的屏幕,模拟界面中,安全无威胁的物体显示为绿色,白色物体为这辆测试车,而前方黄色物体则是被系统判定为具有一定威胁性的前方车辆。
在体验这辆白色的Model S时,工程师在试车场内自动行驶了两圈,其中一圈是跟车行驶,第二圈则是单独的自动驾驶。自动驾驶的试车道与其他车辆试车路线有交叉存在的情况,在交叉路口,发现有车辆驶近的时候,这辆Model S也会延长等待时间。车辆发现弯道、前方有车辆或行人时会自动减速,直道且前方无车辆、行人时会自动加速。不过,这种设定在试车场内会有一个小弊端,试车场内弯道或者直道距离都并不长,导致这辆Model S一直处于加速和减速的状态,除了已经适应的工程师,参与体验的人都表示有晕乎迹象。
3.互联技术
博世的互联技术叫做Connected Horizon,与大陆的eHorizon异曲同工(两个的中文名都叫做电子地平线,未免混淆下文均用英文名)。不过这个技术有另外一个英文名字360°logiQ,是博世与Tomtom合作的产品,TomTom提供地图数据。两者的功能也是有所不同,大陆的eHorizon是从静态的根据前方地形来实时调整发动机工况降低油耗,升级加入联网模块之后才新增对周围情况感知上的辅助功能。
博世的Connected Horizon与大陆的路子正好相反,主要工作是用于收集交通信息并实时上传到云端,装有同一系统的车辆会自动下载云端的最新数据,更新时间为2秒。Connected Horizon可以与博世的一款手机App myDriveAssist配合使用,myDriveAssist是利用手机摄像头去识别交通标志,未来这项功能会集成到车辆前方的摄像头上。
在此基础之上,博世结合带地形的导航数据,可以利用车辆上的摄像头辅助进行精准定位;可以预测前方交通灯的颜色,并根据计算出的变化时间调整车辆速度;可以根据前方地形采取滑行姿态,或者在混合动力车/纯电动车上预判出能够如何最大化动能回收系统的回收能量,避免因为电池容量上限而造成的浪费。
车云小结:
几次参加博世的活动,比较有意思的一个现象是每次都会有人问博世为什么没有造车,博世的工作人员每次都会解释,这是罗伯特·博世先生定下来的策略,作为供应商与车企都是合作伙伴,如果造车那就是分分钟变敌人的节奏。
作为供应商,博世的自动驾驶技术最大的不同应该是实际应用的时候,车企们的选择必然会不同。可能有的只需要传感器(谷歌自动驾驶车上传感器就来自于博世,但是背后的软件算法是谷歌自己的),可能有的只需要某些功能会有所舍弃,很难会出现一辆与博世理念完全相合的自动驾驶车。