自动泊车是一个比较含糊的概念,最初级的自动泊车,驾驶者还需要控制速度和刹车,车辆自己掌控方向盘。再高级点的自动泊车,驾驶者完全放松,不需要掌控速度、刹车和方向,通常厂家会设置一个自动泊车键(叫法不同,比如宝马i3的叫PDC,泊车距离控制),泊车期间驾驶者需要按这个键,这主要是目前传感器覆盖范围有限,有些危险驾驶者能够感知而车辆无法感知。同时还有遥控泊车,有些遥控泊车只能直线行进(例如宝马7系),有些可以拐弯(奔驰E级)。再有就是与停车场配合的无人全自动泊车,这里可以分为以车辆为核心的全自动无人泊车和以停车场设施为核心的全自动无人泊车,前者可以看做无人驾驶的特定场合应用,后者则是AGV(或者叫机器人)来搬运车辆,运送车辆到指定的泊位。
自动泊车过程分为4个步骤: 一、环境感知,用传感器检测是否有合适的停车空间,同时给驾驶者一个直观的显示;二、路径规划,停车点到探测到的停车位,常用的路径规划方法有简单连续曲线(Simple Continuous Curve)、快速探索随机树(Rapidly-ExploringRandom Tree)非完整性与模糊控制(nonholonomic and fuzzy control );三、轨迹控制,通过EPS控制车的运动轨迹,速度一般是固定的每小时5-7公里,速度用离合器或ESC控制;四、刹车控制,一般通过EPB(电子机械驻车制动)来控制刹车,也有少数采用ESP。
一、有人自动泊车
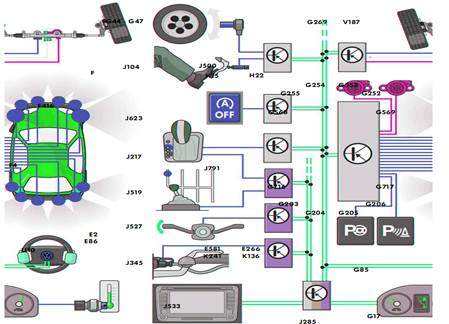
上图为目前典型的高级自动泊车系统,大众的第三代自动泊车系统。
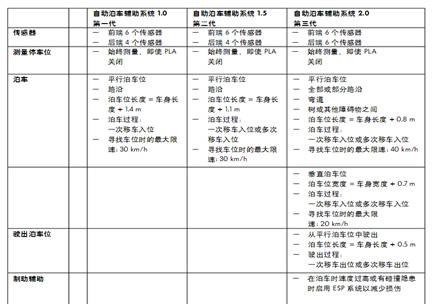
上表为大众三代泊车系统性能对比,第三代系统可以让驾驶者完全放开手脚,当然,你还得挂倒挡。并且要求驾驶者坐在驾驶位上察看周围环境。
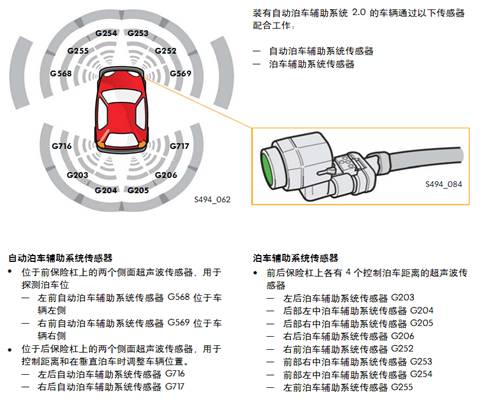
大众第三代泊车系统使用12个超声波传感器,前传感器G568和G569输出的信号为自动转向功能服务。一方面用于测量可用的泊车位,另一方面用于在泊车过程中监测与旁边停泊车辆或障碍物的侧边距离。传感器信号还会影响到驶过角的计算。这两个超声波传感器是特殊的超声波传感器,探测距离最远可达4.5米。一般的超声波传感器有效距离是2米。后传感器G716和G717输出的信号用于测量在垂直泊车时泊车位的实际宽度和位置。传感器信号还用于评价车辆是否停入泊车位的正中间,同时用于监测在泊车过程中与侧边障碍物的距离。
超声波探测距离最多只有4.5米,且容易受温度变化影响,需要做温度矫正。车外温度由车外温度传感器G17测量并发送给仪表内的控制单元。
系统不能识别如下物体:窨井盖、凹陷或松散的路肩、泊车位上较小的物体。超声波传感器的物理特性可能会受一些因素的影响,如传感器脏污、传感器薄膜上有雨滴、传感器上有冰雪,以及大雨、大雪或大风天气。如果路沿上有树叶、垃圾或积雪会加大系统的辨识难度,因为树叶或积雪对超声波信号的反射有较强的影响,会导致系统接收不到返回的超声波信号,造成系统运行错误。另一个关于系统限制的例子是在岔路口或建筑物入口处,系统可能会误将附近大门关闭的庭院入口视作理想的泊车位。
后保险杠上安装的超声波传感器,位置通常距地面50至60厘米。探头发射的超声波呈喇叭状向外扩散,区域渐渐变大。这也就意味着,从地面到探头底部,即探头正下方的区域,会形成三角形的盲区。从实践中看,从地面到低于探头10至15厘米的物体,雷达难以发现。除此之外,每个探头发出的超声波都有一定的范围,因此两个探头之间的位置,也会形成盲区。
二、遥控泊车

上图为比亚迪速锐的遥控泊车,比亚迪在2010年就做到了遥控泊车,且可转向。你按下遥控钥匙上的启动(熄火)键时,无钥匙启动系统会执行遥控器发出的启动和熄火命令,这是遥控技术最基础的一步。此时,发动机处于怠速状态,车辆原地不动。当你再按下遥控钥匙上的前进键时,P挡的机械锁止由控制电机解锁,控制1、3、5挡的离合器1结合,车辆前进。电动助力转向系统接收并执行转角传感器发出的信号,使车辆实现转向功能。为了保证安全,遥控系统的逻辑被设定为松开按键就会自动实施驻车制动。
遥控泊车看起来一点也不难,只要能切入汽车总线就OK了。难点不在这里,而在如何控制车速,通常在倒车时,驾驶员是不踩油门的,发动机处于怠速状态,用变速箱来控制车速,或者说用离合,当然了,自动挡没有离合,但是并不是离合消失了,而是采用电子方式控制。对普通的6AT来说,车速比较容易控制,车速大概是5-公里,但是比亚迪和大部分国产车使用双离合,比亚迪是依靠双离合变速箱中离合器的半结合状态实现限速的,然而这样的方式难免会让人担心相对摩擦产生的热量。据比亚迪工程师透露,车辆在试验阶段已经在遥控行驶状态下做5公里的耐久测试,变速箱没有出现故障。
再一个就是线控换挡,如何在P挡与D挡之间切换。停车时,驾驶员都会将挡位放置在P挡上,变速箱内的棘爪会扣住驻车齿轮,实现驻车锁止。甚至有些驾驶员还习惯拉上手刹,这样车辆就稳稳的停住了。如果此时你想要通过遥控使车辆由静止变为运动,这具体是怎么实现的呢?“原装”变速箱的排挡杆是通过拉索机构与P挡连接球头相连的,P挡与D挡之间的切换需要人为扳动排挡杆实现。其实,如果你采用正常驾驶方式这一切都是一样的。比亚迪的工程师在变速箱上集成了一个控制电机,电机与棘爪相连,在按下前进键的时候,电机会做相应的转动,移开棘爪实现解锁。此时的排挡杆依然停留在P挡位置,但实际上P挡已经解锁了。与此同时,电子驻车系统也会解除驻车制动,控制1、3、5挡的离合器1结合,车辆前进。
遥控泊车的难点集中在变速箱,大部分厂家的变速箱都是外购的,即便是大众这样的大企业也是如此,变速箱厂家为遥控泊车配合改造变速箱成本就比较高,而量小的话,变速箱厂家肯定不会搭理你。顺便说一句,自动挡变速箱那是相当紧俏,像广汽传祺的GS8,都是采购日本爱信的6AT,就因为变速箱而不得不减产。
至于安全问题,遥控泊车是通过手机蓝牙或车钥匙与汽车CAN总线连接,进而控制车辆,车钥匙的方式要更安全一点,不大可能受到黑客攻击,蓝牙的安全性不如车钥匙。车钥匙,也就是遥控门锁中有一个短距离的无线电传输装置,可以与车辆上的ECU通讯。这个无线电传输器会发送包含有身份信息的数据,然后ECU会判断这个秘钥是不是有效的,从而决定随后的上锁、解锁和启动引擎等指令。这种攻击平面很窄。因为,RHFM中一定有专门的固件来负责处理射频信号,加密/解密代码和识别电子钥匙数据的逻辑以及编程备用电子钥匙的逻辑。虽然这是一种可能的攻击途径,但是要想在RKE中找到漏洞来实现远程代码执行似乎是不可能的。
三、EPB
自动泊车过程中要实现主动线控刹车,必须要EPB,也就是电子驻车控制,这可不是简单的电子手刹。
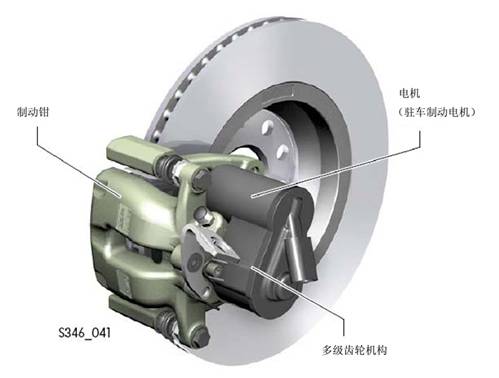
上图为大众典型的EPB卡钳,EPB的关键不在EPB控制器,而在卡钳。
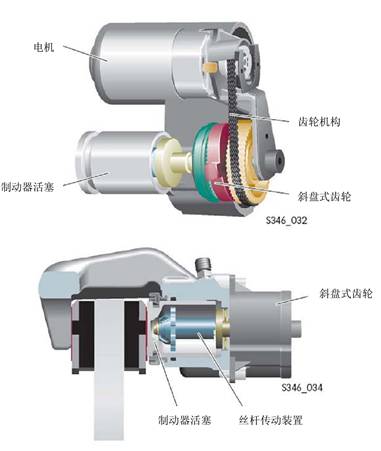
上图为EPB的电机,要想刹车就是让制动器活塞沿直线运动,将电机的旋转运动以总减速比 1:150 分三级转化为直线运动。即电机旋转 150 圈,丝杆传动装置转动一圈。
第1 级– 齿轮机构 从电机到斜盘齿轮输入的减速比为1:3,第 2 级– 斜盘式齿轮 第 2 级齿轮减速比( 1:50)是由斜盘式齿轮实现。第 3 级 – 丝杆传动装置 第 3 级丝杆传动装置将马达的旋转运动转为直线运动。
这个电机的扭矩是有限的,通俗地说就是刹车力是有限的,一般只能对应每小时7公里以下的车速,高于7公里的话,用ESP(ESC)制动。
四、AGV全自动无人泊车
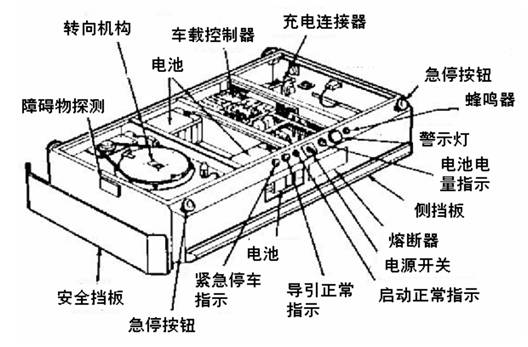
上图是一个典型的AGV。 AGV 是自动导引运输车(AutomatedGuided Vehicle)的英文缩写。是指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车,AGV 是轮式移动机器人(WMR――WheelMobile Robot)的特殊应用。
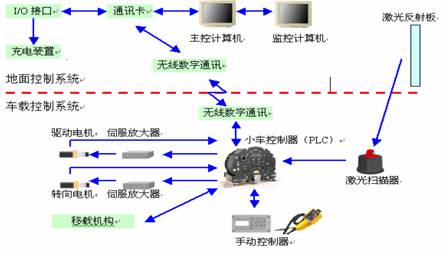
上图是一个典型的AGV系统。早在1953年,英国就开始在物流仓库使用AGV,1973年沃尔沃将其用在汽车生产线上。全球物流领域已经广泛使用。全球范围内有多家致力于AGV自动泊车的厂家,解决方案都大同小异,其中不乏通用电气这样的巨人,不少企业都在10年前就开始推广AGV自动泊车,不过并未见到大规模推广。其原因可能有几点,首先是需求并不强烈,对熟手来说,停车不是难事,新手毕竟还是少数。其次,停车场没有动力去为AGV自动泊车系统做改造,对于公共停车场来说,选择停车场主要的原因是距离因素而非是否能自动泊车。最后还有价格因素,早在2013年底,德国杜塞尔多夫国际机场就专门准备了249个车位给愿意使用AGV机器人停车的客人,车主只需要将车开到停车场的入口,并在触屏上确认车上无人,自助式停车机器人“Ray”就会出现。“Ray”由巴伐利亚的初创公司Serva设计,外形酷似铲车,可以适应承重量不超过3.31吨的任意标准汽车。它既不需要为打开车门预留左右空间,也不需要为退出车位预留前后车距,所以大大节省了停车场空间,同时它应用的也是激光导航的方式。它先通过扫描确定汽车尺寸,然后像铲车一样轻轻将汽车从底部抬起,借助自身的传感器和雷达装置引导穿过拥挤的地下车库,将车辆保管直至车主取回。同时能和机场的飞行系统对接,直接查验车主什么时候回国,然后自动将车提出,车主还可以从对应的App进行日程改变。在德国杜塞尔多夫国际机场,该项服务每小时收费4欧元,也就是31元人民币。缴纳29欧元可享受一天的停车服务。这个价格可不算低,一天要222元,只有土豪才能承担了。
还有以汽车为核心的全自动无人泊车,实际上这和无人驾驶基本没有区别。尽管如此,停车场仍然是需要增加基础设施,这其中以V-CHARGE为典型。


V-CHARGE由6家合作,其中大众提供车辆平台,博世提供传感器,包括双目摄像头、鱼眼摄像头、超声波传感器。意大利帕尔马大学负责障碍物检测和分类。苏黎世工学院提供机器视觉,摄像头标定,视觉定位,路径规划,3D环境重建。牛津大学提供语义地图。德国布伦瑞克工业大学提供停车场管理和V2I通讯技术。
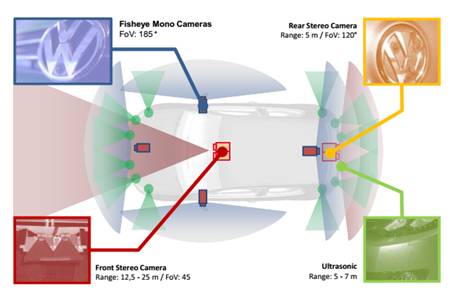
V-CHARGE使用12个超声波传感器,4个鱼眼摄像头,2个双目摄像头,需要比较昂贵的GPU处理。
V-CHARGE目前来看成本较高,虽然2015年底项目已经结束,但一直未有大规模推广,不过未来成本有望大幅度下降,特别是GPU的成本。