2017年2月23日,谷歌母公司Alphabet旗下自动驾驶子公司Waymo起诉Uber,称其涉嫌窃取Waymo的无人驾驶汽车商业机密。Waymo的核心指控是Levandowski离开谷歌去Otto之前下载了机密文件,Uber用窃取的文件设计了激光雷达电路板,设计和Waymo很相似。而这个电路板侵犯了Waymo的专利,专利号为US8836922B1,这是谷歌于2013年8月20日申请的专利,专利生效期自2014年9月16日开始。
做无人驾驶,激光雷达不可或缺,激光雷达是无人驾驶最核心的传感器,不仅可以制造3D的环境模型,同时还可以探测车道线,分辨动静目标并追踪,可以轻松识别大部分静止障碍物,包括建筑物、树木、草地等。激光雷达可以满足90%的自动驾驶工况,摄像头主要是用来检测识别红绿灯,交通符号和前车转向灯。如果将来V2X普及,那么交通信号灯也无需检测识别了。
激光雷达至少有两种成像方式,一种是距离成像,一种是强度成像。后者实际上使用更广泛更早,但在汽车领域应用很少,只有百度、福特、丰田和谷歌使用的比较熟练。激光雷达的强度成像如果密度足够(点云数够多)的话可以达到摄像头那种光电成像的效果,这在遥感领域已经广泛应用,非常成熟。对于遥感图像,最难的就是大片森林覆盖而得不到真实路况,而激光雷达可以实现穿透林区的图像获得。 激光照射在不同物体上会有不同的反射率,就是反射强度,沥青或混凝土路面与油漆车道线之间的激光反射率差异很大,可以获得高光谱图像。这是物理测量的方法,简单可靠,几乎不消耗任何运算资源,准确度远在摄像头视觉系统之上。如果激光雷达做到256线,其成像密度与HD级摄像头会不相上下。由于激光雷达是主动型传感器,因此对环境适应能力强,雨雪的干扰可以通过算法去除,福特早就演示过在大雪天只使用激光雷达做无人驾驶。
谷歌从一开始就意识到这一点,谷歌必须掌握硬件核心才能保证自己在无人驾驶领域的核心地位。因此从2008年,谷歌就开始在秘密研发自己的激光雷达,历时5年多,耗资近亿美元,谷歌成功研发出属于自己的独特的激光雷达,同时成本又比Velodyne的激光雷达便宜90%,便宜90%有夸大的成分,但至少便宜50%是可信的。当Uber仅用8个月就开发出类似的激光雷达时,Waymo第一时间就感觉到自己的专利被窃取了。
我们先来看Velodyne的激光雷达,Waymo当然是参考了Velodyne的设计,不过Waymo确实有独到之处。
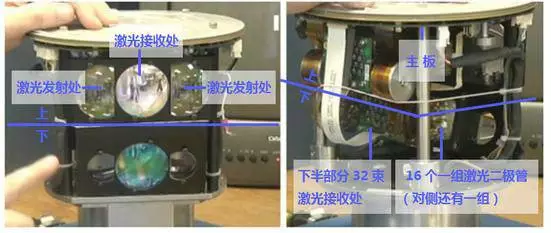
上图为Velodyne HDL-64E激光雷达的内部图。
上图为Velodyne HDL-64E激光雷达俯视图。
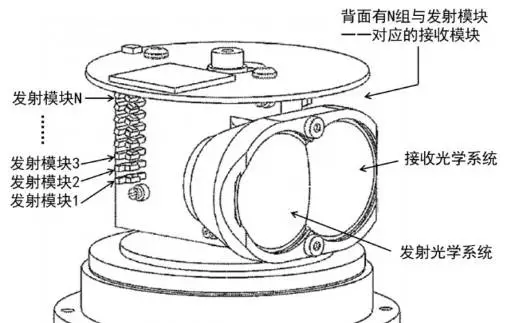
激光雷达不外乎一个发射系统和一个接收系统,发射模块就是激光二极管,使用二氧化碳脉冲激光二极管,二极管贴敷在PCB板上。发射光学系统后端有N组发射模块,而在接收光学后端有N组与发射模块一一对应的接收模块(图中背面遮挡不可见)。当激光雷达开始工作时,N组发射模块和N组接收模块在电路的控制下按照一定的时间顺序轮流工作。在时刻1,发射模块1工作,发射激光脉冲,同时接收模块1接收目标反射的发射模块1发射的激光信号;在时刻2,发射模块2工作,发射激光脉冲,同时接收模块2接收目标反射的发射模块2发射的激光信号;……在时刻N,发射模块N工作,发射激光脉冲,同时接收模块N接收目标反射的发射模块N发射的激光信号。这样在俯仰方向就可以形成非机械式的光学扫描,其扫描角度间隔由两个相邻模块之间的间隔和光学系统的焦距来确定。
为什么Velodyne的激光雷达那么贵?Waymo又是如何降低成本呢?这当中关键的地方不在于其物料成本,而是其生产成本。64个发射模块和接收模块要进行精密光学对准,这种校准暂时没有仪器能够胜任,需要经验丰富的工人手工调试,工作量巨大,一台激光雷达需要老师傅校准可能需要一个星期甚至更长时间,所以可以说是纯手工作品,无法量产。
Waymo知道要降低成本,关键是让光路校准能够简单或自动化,这样不仅能降低成本还能量产。诀窍很简单,但是没点出来之前,人人都觉得很难,这就是FPCB柔性线路板,手机里有很多这玩意。可以将PCB做成任何形状,谷歌是玩过手机的,Velodyne做音箱起家,对FPCB似乎有些陌生。
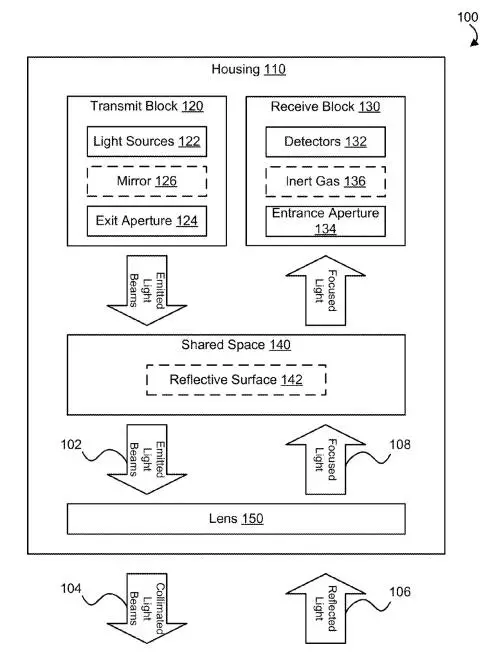
上图是Waymo激光雷达的内部框架图,与Velodyne最大不同是Waymo的接收和发射系统共用一套光路,一个镜头,这个专利系统地名称就是DEVICES AND METHODS FOR A ROTATING LIDAR PLATFORM WITH A SHARED TRANSMIT/RECEIVE PATH,而Velodyne是3个镜头,3个光路。体积也可以缩小不少。

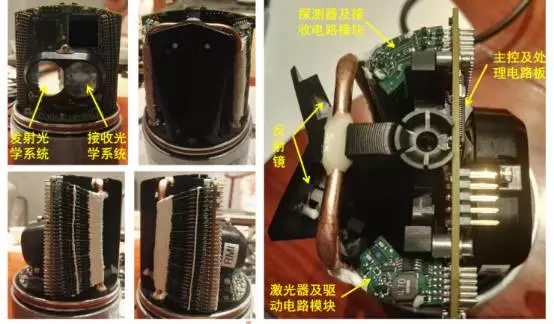
上图是Waymo激光雷达内部示意图。
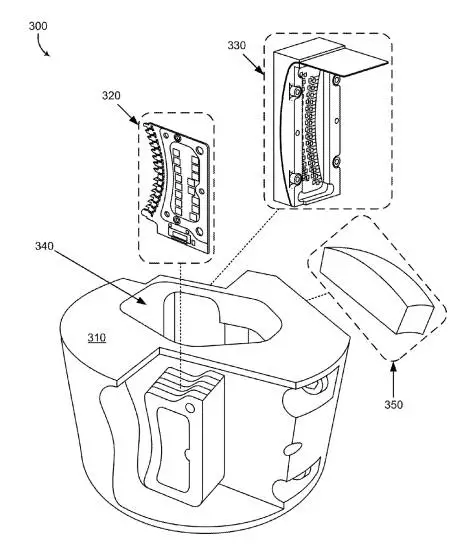
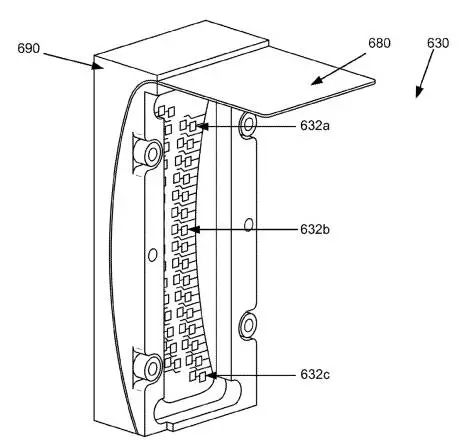
上图为Waymo激光雷达内部的发射与接收模块图
上图为Waymo激光雷达一个模块图。
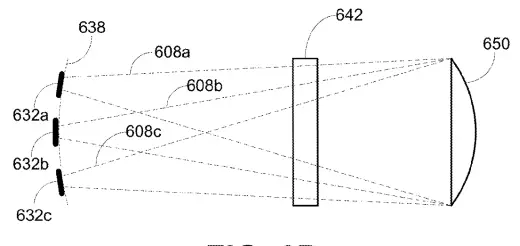
上图为Waymo激光雷达光路图。
Waymo的做法很简单,就是发射与接收模块按照弧形曲线排列,让其与主镜头光路焦点场吻合。这样发射和接收共用一个镜头,一个光路,校准工作大大减少了,成本就大幅度下降了。这就需要PCB板能够弯曲成所需要的弧度,这在以前只有硬质PCB的时代是无法实现的,Waymo的激光雷达使用4片FPCB,每片上有16个激光二极管。这样就有64线了。

上图也可看出,Waymo用激光雷达识别交通标志牌和车道线。
很明显Waymo的并非固态激光雷达,目前常见的固态激光雷达有三条路线,一是Flash型,二是相控阵,三是MEMS。这三种的技术成熟度都不如目前的旋转式激光雷达或性能差很远。
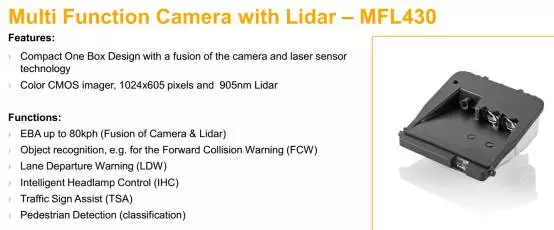
小功率的Flash型激光雷达20年前就有,目前全球只有德国大陆汽车一家公司能够量产。这就是MFL430,在沃尔沃和丰田上大量使用。
进入2016年后,激光雷达开始火热。
1、2016年3月,大陆收购3D Flash Lidar公司ASC。
2、2016年4月,电装投资固态激光雷达公司TriLumina
3、2016年6月,Leddartech向Valeo提供Flash Lidar技术。
4、2016年8月,ZF收购IBEO 40%的股份
5、2016年8月,以色列Innoviz 固态激光雷达获得900万美元投资
6、2016年8月,百度与福特投资Velodyne合计1.5亿美元
7、2016年10月,英飞凌收购荷兰固态激光雷达公司Innoluce
8、2017年1月,大陆推出3D Flash Lidar样品
9、2017年2月,博世、三星与鸿海投资Flash Lidar公司TetraVue
这些Flash型激光雷达可以看做单线激光雷达,与多线激光雷达不是竞争关系,而是互补关系。相控阵目前主要是Quanergy在研发,技术成熟度还不够,最难的是信噪比的问题,MEMS同样如此。

传统的激光雷达已经在2017年量产,已经准备在奥迪A8量产车上使用。这也就是说,传统的激光雷达已经得到传统汽车厂家认可,所以激光雷达并非一定要固态,固态也不一定比非固态成本低。如果将FOV缩小,用多个激光雷达达到360度,那么固态激光雷达的重要性将被削弱。最早的无人驾驶很可能是不用固态激光雷达的,固态激光雷达的成熟恐怕要等到五年以后了。