目前即使最顶级豪车的AEB系统都有很大的局限性,在很多工况下是无效的,如果你仔细翻阅汽车说明书就能深深体会这一点。
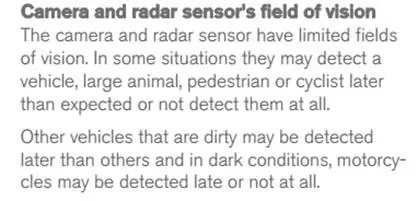
我们以某近百万顶级豪车的说明书为例,上面就很明确指出,在某些情况下可能完全无法检测到车辆、大型动物、行人和骑车人。这个特殊情况就是在车辆、大型动物、行人和骑车人在被前车或侧车遮盖住视线,前车不再遮挡后突然出现,系统无法及时识别,特斯拉几次事故都是如此。然后特别指出黑暗环境下,摩托车可能完全无法检测到。
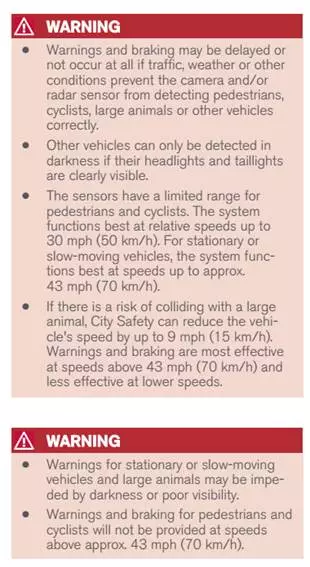
这里明确指出传感器有限制,AEB的最佳工况在相对时速50公里时。对于缓慢移动的车辆,系统最佳工作时速在70公里,超过70公里AEB是无效的。
局限一是目前绝大多数AEB都是只针对车辆的,对行人和骑车人无效或不明显,或者说探测行人需要比较长的时间,碰撞时速度仍然较高。
以特斯拉为例,http://www.autohome.com.cn/tech/201612/890343.html,汽车之家对其进行了简单的测试。测试车是更新了v8.0系统的MODEL S 90D,在行人测试中,静止行人完全没问题,但是在移动行人检测中,当车辆与行人接触后系统才做出反应,尽管此时系统实施了主动制动,但作用已经不是很明显。
欧洲NCAP的行人AEB测试规则7.2.3明确指出测试车辆的时速范围在20-60公里之间。只有CVNA-75场景的附加测试才会测试时速10、15公里工况,此时假人的速度也要提高到5公里每小时。厂家大都是依照此标准做技术开发,否则即使你做得再好,NCAP得分也不会增加。之所以定这样的测试条件,NCAP此举也是考虑到了大多数厂家的能力水平。当然成本也是关键因素,毕竟豪华车只有奔驰和宝马。 这些车厂的说明书干脆直接说,对于低速移动的车辆、行人和骑车人全部无效。这是一个策略问题,低速工况通常是在闹市区,行人,骑行者比较多,AEB系统容易误报,误报很容易导致驾驶者把AEB功能关闭。高速时,行人,骑行者比较少,误报不多。不过高速时需要系统反应速度更快,因此AEB的最佳工作速度是在30-40公里。
局限二是盲区明显。车辆转弯时,AEB基本是无效的,迎面而来的交叉车流或转弯车流,对面来车突然变道等等,AEB也是无效的。
局限三是天气和光线。对于摄像头为核心的AEB系统,低照度情况下基本无效,高亮度如正对阳光也会无效。
局限四是速度范围。一般来说单纯以毫米波雷达为传感器的AEB系统最高工作上限为时速30公里,以单目摄像头为核心传感器的AEB系统最高工作上限为时速40公里,单目与毫米波雷达融合的AEB最高工作上限为时速70公里,以双目为核心传感器的AEB系统最高工作上限为时速90公里。同时还有一个最低下限。以单目为核心传感器的工作下限为时速8-10公里,毫米波雷达为时速5公里,摄像头与毫米波雷达融合为时速3公里,双目为3公里。我们认为,目前的AEB系统没有太多实用价值,要完善AEB系统的路还有很长,最少需要五年时间来完善。
配备AEB的2017款车型测试结果
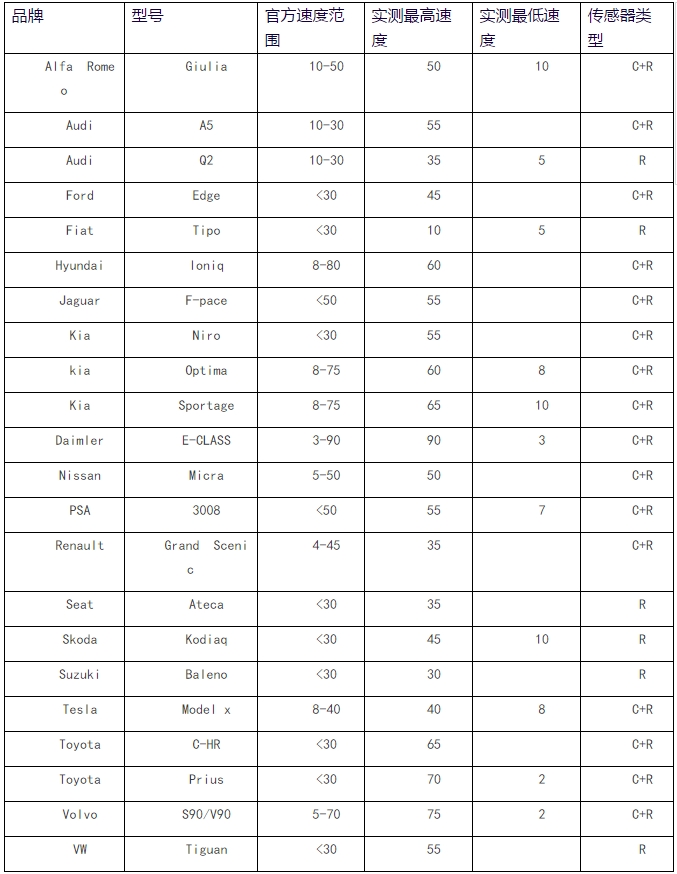
可见奔驰表现最好,其次是沃尔沃XC90,再次是丰田普锐斯。上表中C代表摄像头,R代表毫米波雷达,基本上都是两者配合使用,也有少数厂家只用毫米波雷达。
为何AEB系统会有如此多的局限,有这么大的差别,下一篇文章会详细论述。
下面我们来看AEB测试。
传统的AEB测试都是车与车之间,欧洲NCAP定义了三个场合,第一种是CCRs,Car-to-Car Rear Stationary。
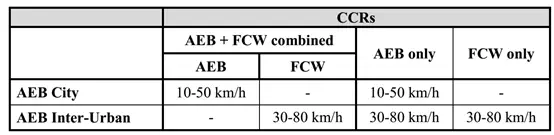
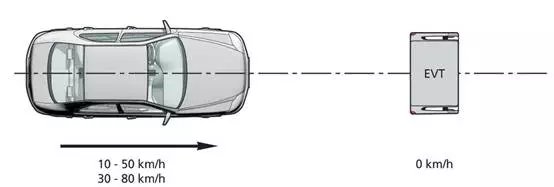
这种情况下前车(也就是假车)静止。
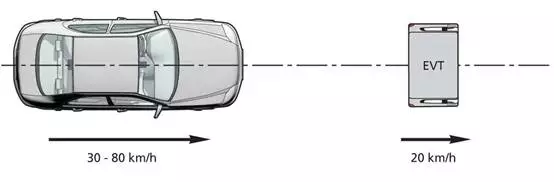
第二种是Car-to-Car Rear Moving (CCRm),这时前车速度稳定于时速20公里。
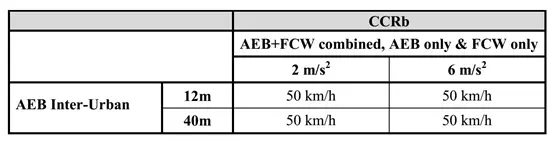
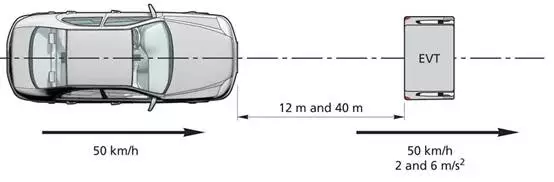
第三种是Car-to-Car Rear Braking(CCRb),前车与后车速度都保持时速50公里,距离在12-40米之间,前车开始减速,减速度在2-6m/s2之间。
最早将行人AEB加入测试的是欧洲NCAP。只要能在目标车(假车)或人偶(假人)前有减速,欧洲NCAP都会加分。不过这在大部分中国人看来,最后只要发生碰撞了,就是无法接受的。然而如果将避免碰撞作为加分标准,那就恐怕大部分车都无法加分了。
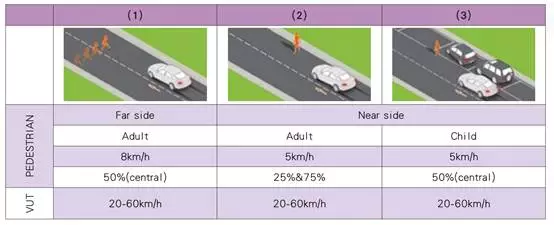
AEB 行人防撞功能评价内容主要包含三项场景 : (1) 成人远端接近场景、(2) 成人近端接近且车辆 25% 偏置与 75% 偏置碰撞场景、(3) 儿童近端接近场景。主要用于模拟车辆行驶于一般市区道路,驾驶者因分心未注意前方路况,而又有行人想要横越马路之情形。配备 AEB 行人侦测功能之车辆,应能侦测前方行人,在危险时能进一步采取刹车行为降低危害。Euro-NCAP设定不同的试验场景,且有不同的测试车速与行人移动速度,在测试时是否发生碰撞或撞击前的减速效果也给予不同之评分。此外,针对车辆 AEB 系统之使用接口功能,也给予不同的分数。例如,操作接口中如果驾驶者无法仅以单一按钮关闭AEB 功能,或者在碰撞前 1.2 秒可提供声音警示,或者低照度情境 (<1000 lux) 系统不会自动关闭 AEB 功能,都可获得加分。
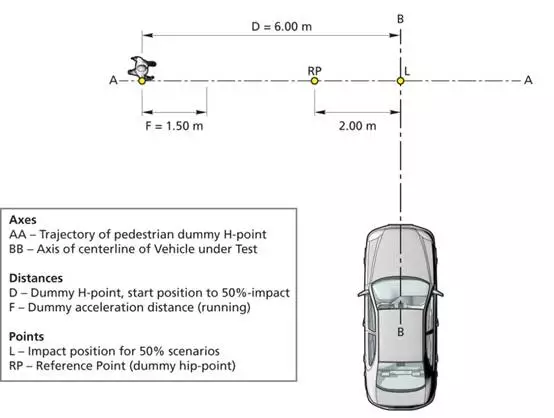
行人远侧AEB测试布局图
行人AEB测试的三种场景
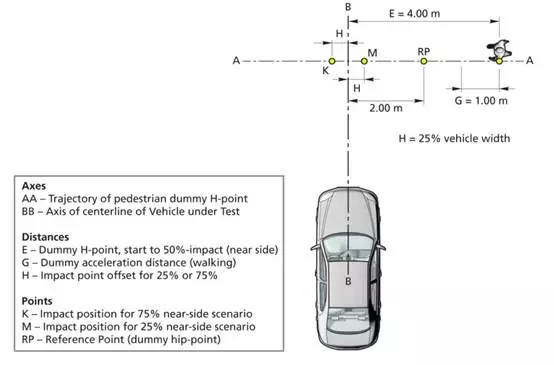
在上表之第 (1) 项场景为对向车道的成人自人行道横越马路。因行人是从测试车对向车道的一端出发,相对于测试车行驶车道为远方,故称远端接近场景 (Far side)。此场景行人移动速度为 8 km/h,相当于成人跑步的速度。车速以 20 km/h 开始测试,设定行人与测试车碰撞于前保险杠的中心位置 (50%central),以间隔 5 km/h 逐次提升测试车速,直到测试车速为 40km/h 以上时,碰撞前减速量低于 20 km/h 时结束测试,或达到车辆制造厂设定系统适用速度上限,但以 60 km/h 为限。成人场景也有人偶从近端启动的测试条件,行人从测试车同侧的人行道横越马路,与远端接近场景不同的是行人步行速度为 5 km/h,默认碰撞位置为车辆保险杠中心往左右各偏移 25% 车宽的位置,即《行人AEB测试的三种场景》之第 (2) 项场景。
行人近侧AEB测试布局图
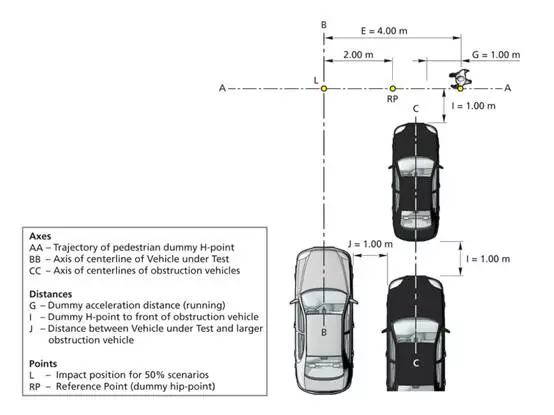
另外,市区行人不只有成人,也有儿童,尤其儿童对于道路安全警觉性较低,往往在市区道路中玩耍,然从安全区域不顾一切冲向道路的情况也经常出现,故 Euro-NCAP 评价系统亦设定有儿童行人场景,即《行人AEB测试的三种场景》之第 (3) 项场景。此场景较成人场景特殊,儿童人偶一开始受两台深色轿车遮蔽,测试车从远方接近进仅能看到路边停有两辆轿车,驾驶的视野上没有看见儿童行人的机会。待测试车接近时,儿童人偶才5 km/h( 大约是儿童跑步的速度 ) 冲到测试车的行车路径上,这是较为严苛的场景,因为儿童行人一开始到车辆遮蔽,测试车接近时才突然出现,车辆的 AEB 系统需要有很好的实时侦测与运算判断能力,才能良好的反应,再者,儿童的体积较成人小,侦测系统未必能有效判断。NCAP 评价程序设计了这样的场景测试车侦测性能。测试车速与条件皆参考《行人AEB测试的三种场景》,与成人场景相同,皆自 20 km/h 开始,每次增加 5 km/以 60 km/h 为上限。当车速 40 km/h 以上时,碰撞前减速量低于 20 km/h 时亦停止测试。
儿童近侧AEB测试布局图
场景中设定标准之场景条件,如 : 设置特定的车速条件与行人移动速度、要求行人髋部碰撞在车辆保险杆之固定位置、人偶在特定的位置启动,并于启动后约一两公尺左右就要达到定速移动等要求,以上要求都要十分精准的硬设备与软件控制。
前述的三个场景与这些特殊的精准度要求,虽然无法涵盖所有外界的用车场景,但目的是为了确保所有的测试车在相对固定的测试条件中进行测试,以保证测试评分标准的一致性,Euro-NCAP 也已准备模拟其他可能的行人场景,在可预见的未来,Euro-NCAP 将会增加场景以期能模拟大部分状况。
为了对应此项 Euro-NCAP 新增的 AEB 行人防撞侦测验证程序,需有高精度的人偶控制系统以达到精准的人偶行为控制,才能透过软件来设定与测试车辆的碰撞点,并搭配实验室现有之差分卫星定位系统 (RTK DGPS),于测试时回馈测试车与行人人偶之位置与速度信息。
其中,行人人偶作为测试车侦测的主要目标,Euro-NCAP 规定须采用特殊反射材质之人偶,包含儿童人偶与成人人偶,其规格、尺寸、重量及颜色均明订于程序附件中 ( 这也是为了试验时,车辆系统对侦测人偶的一致性 )。此外,为了能够有效模拟行人移动时脚部摆动的特性,成人与儿童的人偶髋部都安装一组电机,可控制人偶脚部固定频率摆动。并根据测试时设定不同的移动速度,人偶脚部摆动的频率也不同,因部可随移动速度而摆动,故称为主动式人偶。部分的车厂或系统开发商可能自行研发人偶做为侦测目标,大多为脚部固定不动的设计,在系统开发初期可先以此简易人偶进行测试验证。
Euro-NCAP 则率先与厂商开发出脚步可摆动的行人人偶,能更有效的模拟行人移动,是目前最新的且最先进的 AEB 行人侦测人偶。人偶安装于一牵引平板上 (Surfboard),平板则透过时规皮带与行人人偶控制站上的马达致动器连接,测试时工程师利用控制软件控制马达致动器之输出行程与速度要求,带动时规皮带来控制行人人偶移动速度。这套系统利用安装于计算机的控制软件可透过监控测试车动态行为作为触发行人人偶启动时机点,其中测试车动态行为与行人人偶速度皆透过差分GPS进行记录,将数据传送到行人人偶控制站的控制主机进行处理分析。
既然有碰撞的行为发生,损坏的风险当然存在,所幸此套系统在设计时已经考虑需要经常受到碰撞,行人人偶的材质是以泡棉为主,外层以布质材料包覆。人偶透过压克力管安装于牵引平板上,并以棉绳固定位置,所以在碰撞发生时,行人人偶与车体接触部分将不至于对车辆造成损伤,而行人人偶本身则可能有碰撞的痕迹,可透过清洗保养消除。
搭载行人人偶的牵引平板则是塑料材质,底层为铁氟龙塑料材质,牵引时与地面磨擦能够自润,有利于滑动。其上设计卡榫与人偶之压克力管连结,碰撞时能受力而与人偶分开;牵引平板设计为扁平状,两侧各有一组凸轮绞盘用以连接时规皮带,具有快速释放时规皮带的功能,当车辆在测试中未能煞车而产生碰撞时,测试车撞击人偶的力道将使行人人偶脱离人偶平板,且时规皮带也将被凸轮绞盘释放,车辆可辗过牵引平板,藉此减低撞击对行人人偶、牵引平板及时规皮带之损伤,也达到保护测试车辆的效果。