Civil Maps是一家三维地图初创公司,总部位于加州。CivilMaps 从汽车内部传感器收集数据,并将其转化成为“智能地图信息”供自动驾驶汽车使用。本文原作者为CivilMaps,佐思产研做了简单翻译整理。
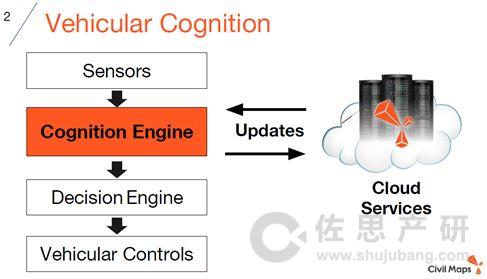
车辆认知:从传感器、认知引擎、决策引擎、到车载控制
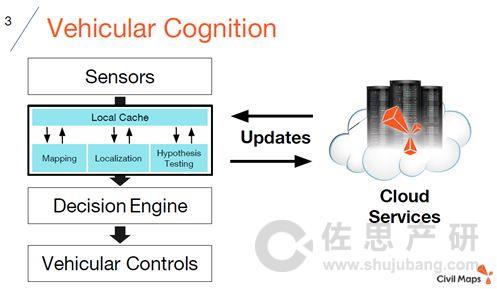
车辆认知:从传感器到本地缓存(包括映射、定位及假设检验过程)
Civil Maps管理团队

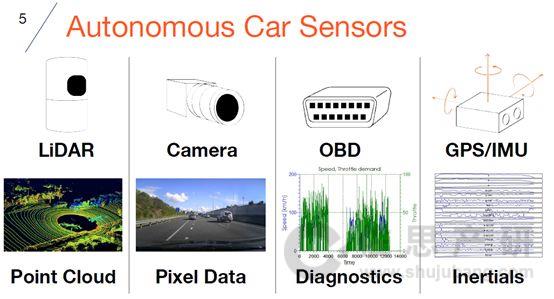
无人驾驶汽车传感器(激光雷达、摄像头、OBD、GPS/IMU)
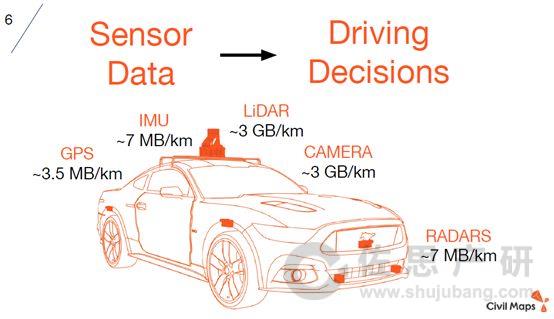
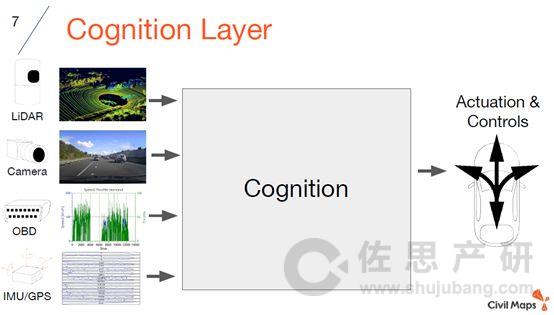
传感数据到驾驶决策
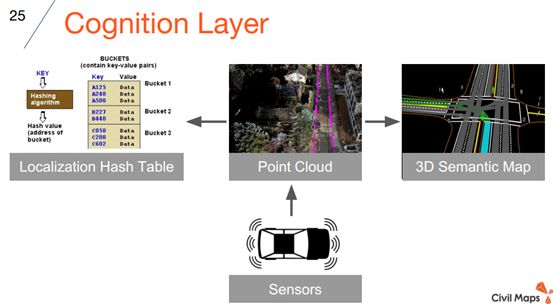
认知层
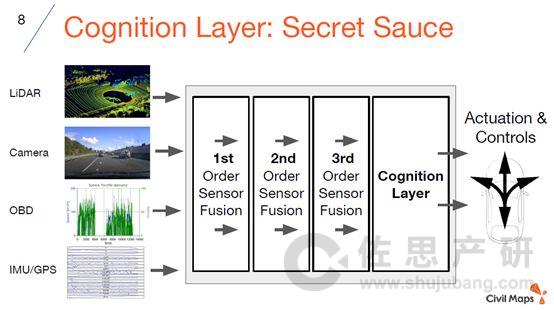
认知层:秘籍
Atlas DevKit 系统

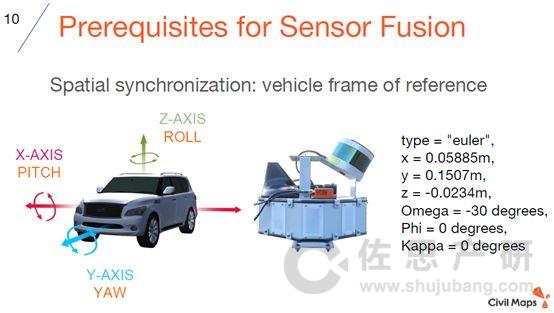
传感器融合的必备条件
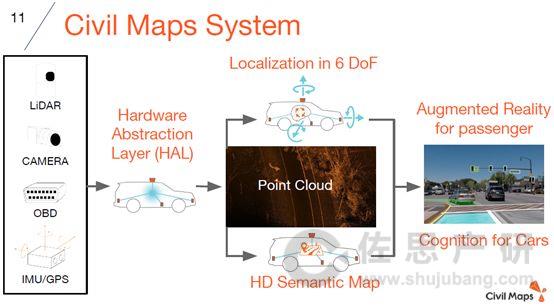
Civil Maps系统
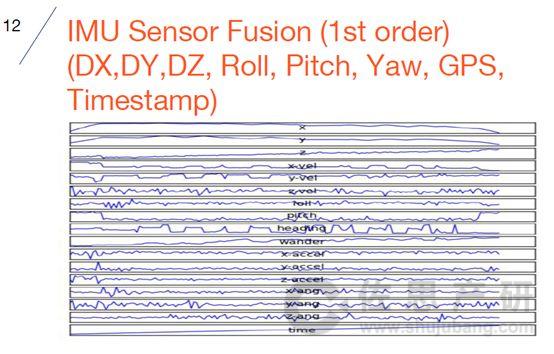
惯性测量单元传感器融合(一阶)
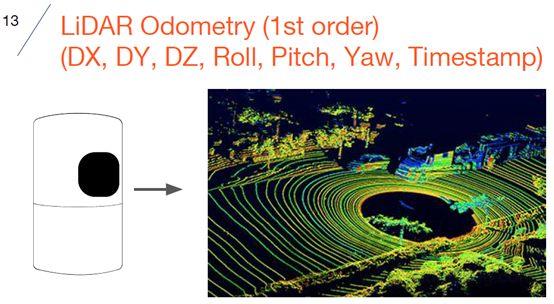
激光雷达测程法(一阶)
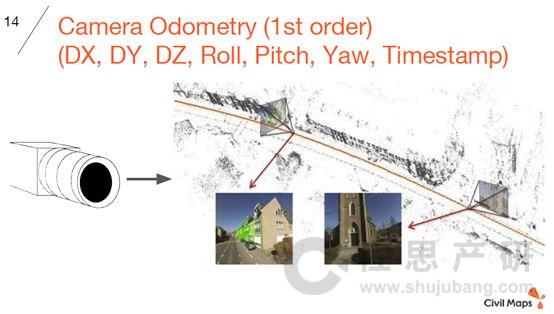
摄像测程法(一阶)
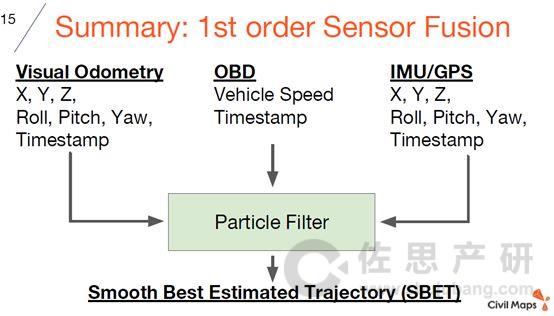
总结:一阶传感器融合
二阶传感器融合
摄像头投射(二阶融合)(RGB FoV + LiDAR + SBET) = RGB PC

三阶传感器融合
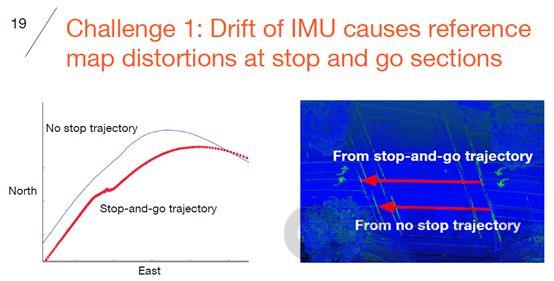
难点1:时走时停交通路段(stop-and-go, S&G),IMU偏移会使参考地图失真
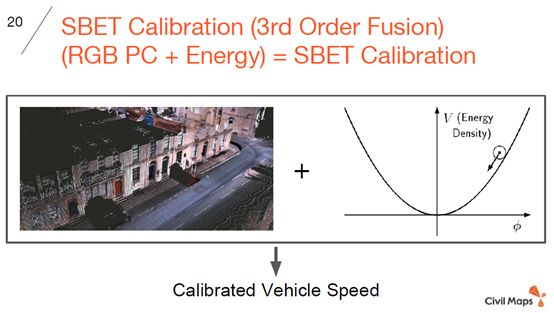
最佳平滑轨迹估算(SBET)校准(三阶融合)
(RGB PC + 能量) = SBET校准
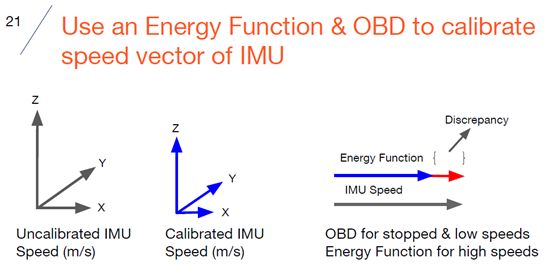
通过能量函数以及OBD对IMU速度向量进行校准
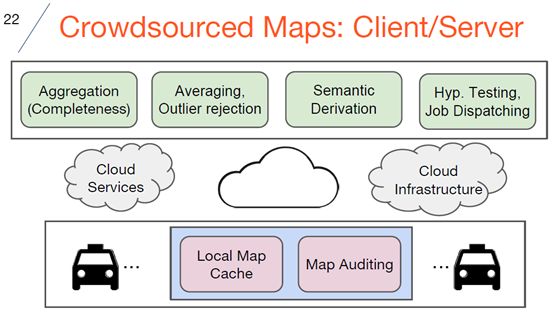
众包地图:客户端/服务器
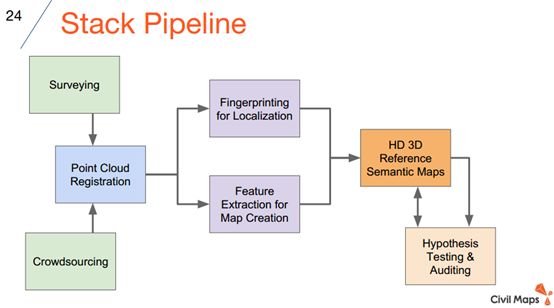
认知层:堆栈管道
认知层
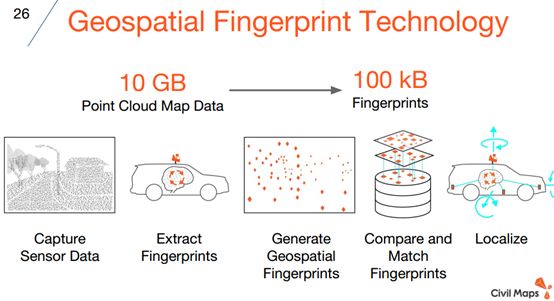
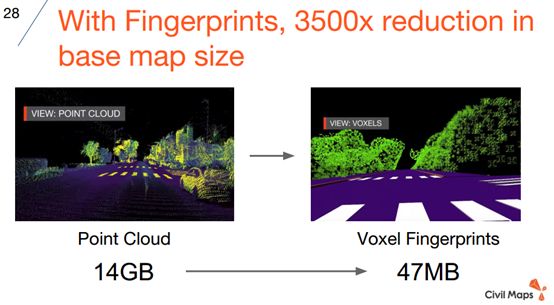
地理空间指纹技术
指纹基础地图:自动驾驶车辆如果知道自己的位置
利用指纹技术,将基础点云地图进行3500倍压缩,从14G压缩到47MB
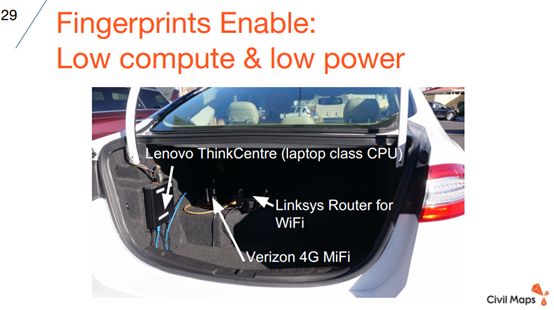
指纹技术能够降低计算和功耗
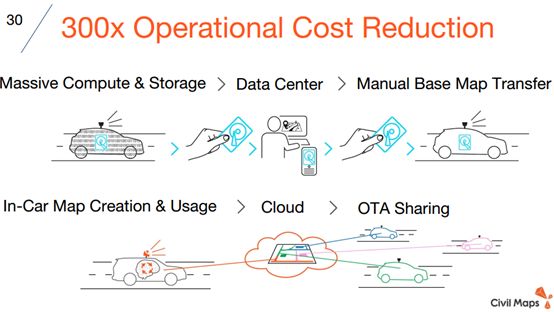
运营成本降低300倍
传统地理围栏vs. 游动边缘绘图
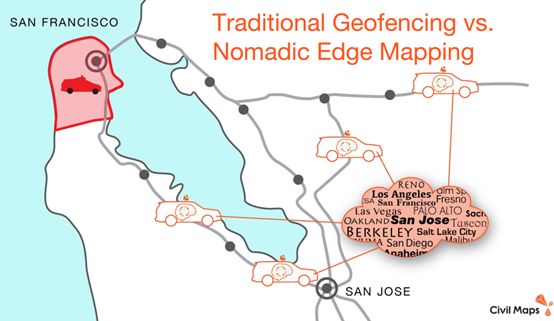
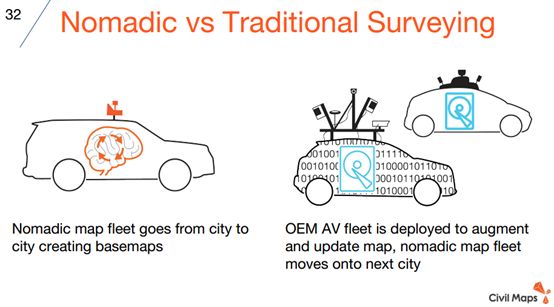
游动vs传统测量
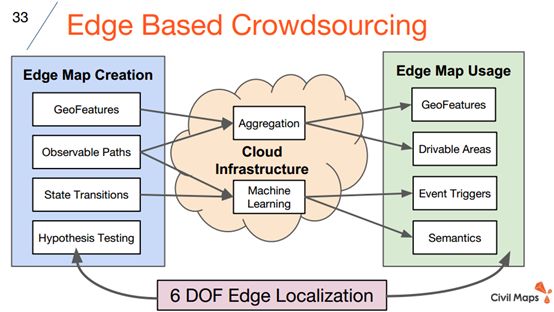
基于边缘的众包
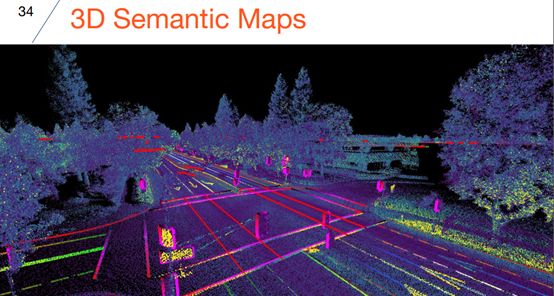
3D语义地图
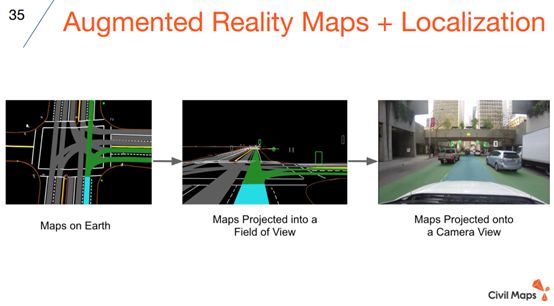
增强现实地图+定位
通过6个自由度的定位实现自动驾驶车辆认知

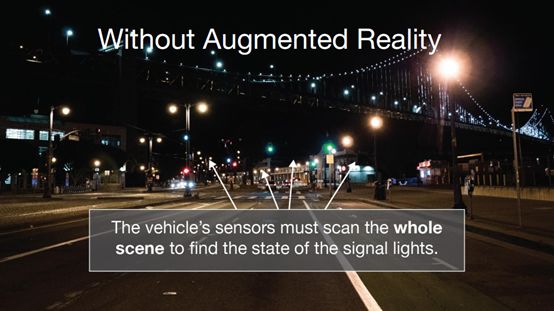
没有增强现实,传感器需扫描整个场景后,才能识别交通信号灯状态
有增强现实,地图会通知车辆哪儿是优先注意点,减少认知负担
