3月20-21日,由佐思产研、佐智汽车主办,地平线、TTTech、魔智、海信网络科技、晶众股份、芯仑光电、PLK、中科慧眼等单位支持的2018第三届ADAS与自动驾驶国际论坛在上海银星皇冠假日酒店举办。超过400多位嘉宾参加了本次论坛,美国国家仪器大中华区汽车业务经理方勤发表了《基于平台化方法的新一代智能汽车测试技术》的主题演讲。

美国国家仪器 大中华区汽车业务经理 方勤
方勤:我来自美国国家仪器(简称“NI”),专注于测试测量、自动化行业。在自动驾驶的领域里,我们的角色是服务于芯片厂、零部件厂、主机厂。在自动驾驶研发过程中,提供产线和实验室辅助验证的方案。我今天的主题围绕自动驾驶领域的解决方法。
测试,第一反应是仪器,仪器是测试最重要的媒介和手段。如果在座有听说过我们公司,绝大多数可能会听到过两个主要的名词,一个是叫虚拟器,第二个是图形化软件。这是我们提出的针对自动化和定制化的测试需求的平台化架构,核心概念就是允许用户做自定制,然后模块化硬件来提高系统的重用性。
如果使用过NI提供的设备,设备是没有界面的,所有界面都是客户定制的界面。我们提供的设备都没有主机,是一个个模块,一个个网卡,所有仪器像自动驾驶系统拆分为感知、决策、执行一样。仪器就是输入输出和计算两个部分,我们提供的是输入输出,计算部分利用商用计算机平台统一整合起来就可以实现集成化的方法。
今天我要介绍NI新的进展和方向,从去年开始在公司战略层面重新定义未来关注的四个行业方向,分别是:半导体、汽车、航空航天、科研院所。这四个方向里面,除了平台之外,更进一步积累了针对于行业的实际方案。在汽车解决方案上我们涵盖的面也很广,我今天介绍在自动驾驶ADAS的解决方案。

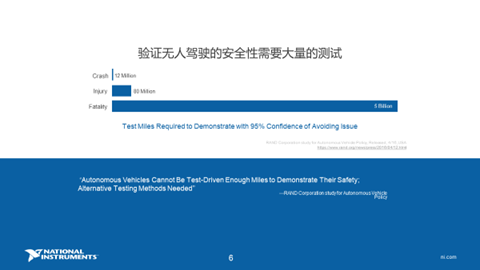
讲到测试,自动驾驶测试验证的目的是什么?要验证系统好,验证自动驾驶的安全性。绝对安全是一个非常遥远的概念,我们要证明自动驾驶比人工驾驶更安全,最基础的手段就是大量的路测。

考虑人工驾驶的常规手段,安全性门槛也很高。根据美国交通部统计数据,全美所有司机一年驾驶里程大概3万亿英里,一年美国发生的伤害事故大概2300万起,致命死亡事故大概32000起。这意味着在人工驾驶的情况下,一例死亡事故平均驾驶里程是1亿英里。
回到路测,要证明自动驾驶比人工驾驶更安全,路测基础里程应该是多少?在上周首尔NI有一个活动,梅赛德斯奔驰的博士透露,到现在为止在44款项目上,总共做了900万英里的路测。
截止2018年3月,Waymo自动驾驶路测里程超500万英里。这个数据和我们要达到的一个驾驶员平均1亿英里的安全行驶里程还有很大差距,所以纯粹用路测来验证安全性,其成本和负担非常大。
我们提供的方法,是作为路测的辅助,在软件、硬件、零部件和台架的平台上通过硬件在环进行安全性验证。讲到硬件环节,基本的核心概念就是我们把车辆抽象为一个模型,包括动力总成、底盘、刹车、ADAS。
这些都通过参数化方法进行配置和仿真,把真实的控制器和可灵活配置的场景模拟器进行互联,从而替代掉一部分路测功能。这是传统的做法,我今天要介绍的是在传统硬件在环上添加新的功能,使ADAS能够在硬件在环领域进行验证。提到ADAS的测试对象,包括毫米波雷达、摄像头、激光雷达、ADAS以及后端的节点。

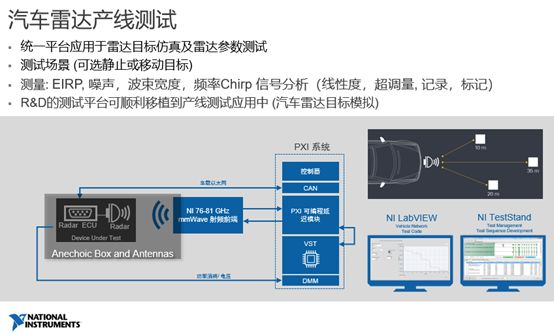
毫米波探测的原理和蝙蝠、海豚很像,是通过微波在空间反射时间的延迟判断距离,通过反射波形的偏移判断对象接近我还是远离我。所以在仿真验证的平台上,同样可以通过高效、高速的硬件在微波传输的时间内,在程序下实现对雷达发射波频谱的搬移以及时间叠加,在雷达上让它误以为是一个真实目标。
我们现在可做到的仿真测试,参数范围可以到:目的距离4米到500米,距离分辨率可以到0.1米,速度分辨率0.1公里每小时。这也是现在市场上主流的需求。
我介绍一个成功案例,在去年的上海汽车展上已经发布了。天津中汽中心,在我们的平台上通过回波模拟的方法,验证自动驾驶开发阶段的场景以及安全性指标。这个平台上目前实现了三种常见场景,一个是ACC,一个是FCW相关标准中定义的场景仿真测试,一个是C-NCAP2018版中AEB定义的典型场景进行仿真测试。


今天刘博士提到了他们参与的中国交通事故数据库,我们和中汽研的合作,未来也将在中国道路上的常见事故数据库加载到这样一个平台上,来实现针对常见事故的仿真和验证。
这里有一个问题,场景怎么去加载?仿真是否和真实路况场景一样逼真?我们可以和第三方的很多场景建设软件进行互联,譬如两家比较主流的公司,一个是PreScan,一个是Carmaker。我们可以做到从场景仿真软件上提取要在硬件上仿真的对象坐标,通过我们的回波模拟器将实际信号和场景实时互联,发射到真实的雷达上,来实现这样一个仿真。
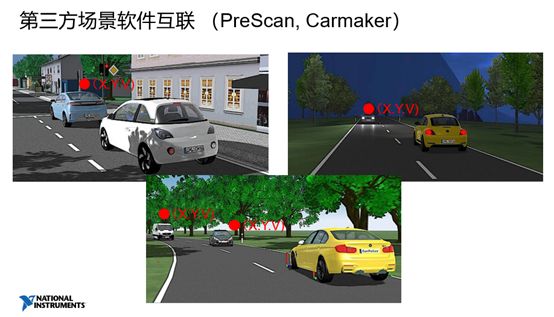
这是我们在办公室去年年初做的一个演示,给大家展示我们是怎样实现互联的。左侧是场景和动力学模型的仿真环境。该演示仿真了一辆车在高速轧道并道跟随前车ACC的场景。这是一个雷达的交互界面,你可以看到雷达所探测到的实时目标会在这个界面上进行显示。
仿真展示右侧是真实的雷达放在前面,后面有回波模拟器仿真这样一个路况。这个场景跑起来以后,这辆车开始做自主寻道,然后做轧道的并道和跟车。这个场景的构建是在场景模拟器里面直接构建的,从场景模拟器里面对象的坐标到提取到一个真实的回波模拟,产生雷达的实时回波,被真实的雷达探测到,这两边的数据是同步的。所以就能在零部件阶段验证雷达传感器以及雷达算法,在一个并道场景中的表现。
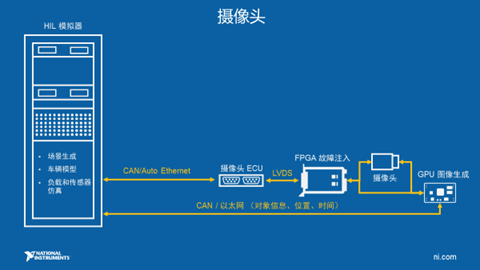
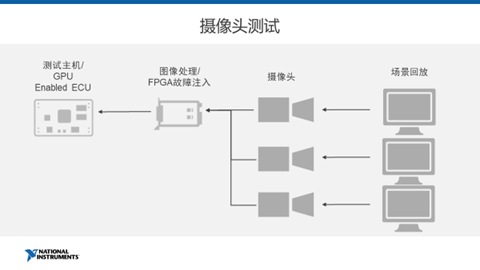
第二部分介绍摄像头,我们主要针对摄像头自定制的协议,来实现和测试与主机的互联,这里用到的是自定制的卡。由于可以做自定制,可以适用于不同相机的传输协议来进行用户定制。这里的案例是我们和法雷奥合作的,在欧洲和中国对法雷奥相机的数据转换生产性测试和研发互联都用到这样一个解决方案。

第三部分是关于V2X。
去年,国家无线电检测中心在天津车检院做了这样一个测试,仿真了两辆车在90度直角障碍物遮挡的情况下,测试V2X最远通信距离能够达到多少?以及在弯道、直道高速的情况下,车车通信协议上连接距离是多少?到现在为止大家还停留在用仿真器做V2X通信的阶段,但是我们已经储备了将V2X连接到硬件在环的能力。
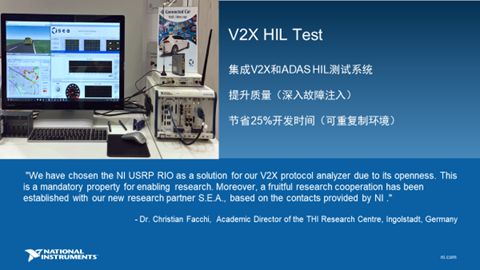
我们会提供一些模块,模拟车载节点,来实现车和车之间的数据通信。包括我们会对一些V2X模块的一致性等做测试。我们在德国有一个案例,在V2X的研发阶段用了V2X节点做算法开发。
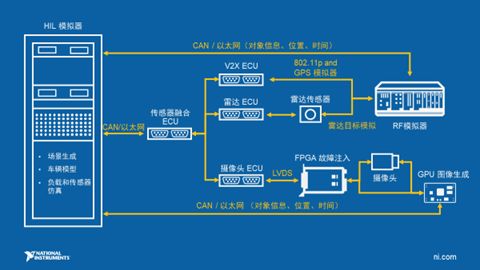
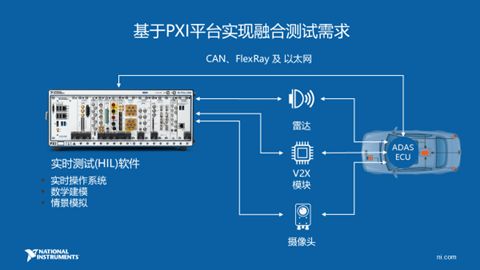
刚才讲了雷达、摄像头、V2X,最后回到融合的话题。在实际路况上,对象同步性是显而易见的,当真实道路上出现一个人,摄像头、雷达、V2X看到这个人一定是同步的。但是在仿真测试的环境下,要通过视觉场景、雷达回波模拟器、射频发射节点,三个不同源头去模拟真实路况的场景。
实现三者的同步技术,保证仿真和实际路况尽可能接近,是一个关键挑战和趋势。得益于刚才讲的虚拟化仪器平台,通过在同一台主机上实现三个对象的仿真,在有必要的情况下通过交互,能够实现毫秒及亚毫秒级的数据同步,来保证验证融合算法的时候仿真对象是真实的。
我们去年在美国和上海做了一个演示,这是一个到目前为止最全的传感器融合硬件在环解决方案。

左上角是毫米波雷达仿真,左下角是一个摄像头仿真,右上角是激光雷达仿真,右下角是第三视角界面。三个仿真是完全同步的,所以在进行超车动作时,三种传感器的感知融合很统一。
从实验室到生产线,除了整车厂研发验证之外,我们在国内外给很多的传感器供应商产线做质量测试,以及针对汽车雷达的车规测试。在高低温环境里测雷达功能来验证它是否符合车规,以及在EMI、EMC场景下怎么去验证雷达。甚至对于匹配车型的测试,在雷达装在了某一个特定的材料上面,涂料、形状、金属对雷达产生的影响,我们都做了深入的研究。
去年7月全球首款L3自主驾驶车奥迪A8发布之前,怎样保证自动驾驶技术是安全可靠的,结合了路测和硬件在环两种技术。NI是硬件在环技术供应方。
谢谢大家!