
2018年CES上,百度发布了Apollo 2.0,搭载了百度Apollo 2.0系统的自动驾驶汽车将拥有简单城市道路的自动驾驶能力。Apollo 2.0 的发布,也意味着百度整体的自动驾驶系统被开放出来,其中包括了云服务平台、软件平台、参考硬件平台以及参考车辆平台。
AutonomouStuff曾运用Apollo1.0,三天改装出循迹自动驾驶汽车。Apollo2.0推出后,AutonomouStuff在一周内将车辆升级为“Apollo2.0版本”,已能够实现昼夜简单城市道路自动驾驶。
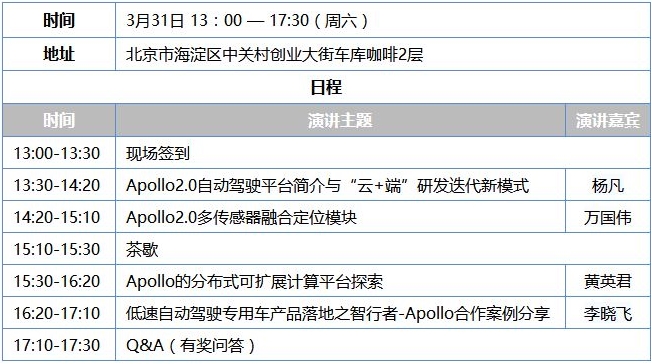
由百度主办、佐智汽车佐思产研承办的Apollo自动驾驶公开课第3期,即将于3月31日在北京举办,将引导自动驾驶开发者深入应用Apollo2.0。本次公开课邀请了百度自动驾驶事业部的资深工程师,以及Apollo的老用户,一起与开发者们交流,快速掌握Apollo2.0的最新功能。参加Apollo公开课,还能加入Apollo开发者的微信群,便于长期交流使用经验,迅速解决自动驾驶开发中的各种问题。
演讲嘉宾简介
杨凡:百度自动驾驶事业部资深架构师,负责产品化解决方案。
演讲摘要:Apollo开放平台简介、Apollo能力开放简介、Apollo资源开放与研发迭代新模式、Apollo生态阶段性成果。
万国伟:百度无人车定位技术负责人,Apollo 核心算法技术负责人,设计并搭建了Apollo多传感器融合定位系统。
演讲摘要:无人车定位技术是自动驾驶领域的基础技术之一,其难点在于如何保证高精准度和高鲁棒性。Apollo2.0的多传感器融合定位模块自适应地使用GNSS、LiDAR及IMU等传感器,在许多有挑战的场景(例如市区、隧道等)都达到了厘米级定位。本次演讲将分享定位模块的框架,以及各子模块的算法原理。
黄英君:长沙智能驾驶研究院公司产品部负责人,从事智能驾驶方面总体解决方案与产品研发工作,对Apollo的分布式扩展方面进行了探索。
演讲摘要:智能驾驶的技术平台和系统架构飞速发展,多个厂家都提出了自己的系统架构和解决方案,目前并没有一个统治性的方案。Apollo集中运行感知、决策、控制模块,对资源、实时性、可靠性需求是不同的,对计算平台、操作系统、运行环境的要求也各不相同。我们分享将这些模块进行解耦,分布式集成运行在不同的计算平台和操作系统上,即在一个高可靠的双机备份低成本平台上运行决策与控制模块,在多个低成本高性能技术平台上运行感知模块,实现一个分布式可扩展的解决方案。本次分享主要包括:在 Jetson TX2上进行Docker扩展,运行Apollo;在Apollo on Jetson TX2中配置TensorRT和VisionWorks适配,进行视觉算法优化与加速。
李晓飞:智行者科技联合创始人&技术研发部总监。
演讲摘要:风起云涌,自动驾驶产品落地之路为何困难重重?扑朔迷离,自动驾驶应用场景究竟出路何方?众志成城,智行者和Apollo如何携手并进?主要讲述自动驾驶落地场景及应用挑战,智行者AVOS系统研发,智行者与Apollo的技术合作三个部分。
